|
Ask a number of people
to describe a robot and most of them will answer they look like a
human. Interestingly a robot that looks like a human is probably
the most difficult robot to make. Is is usually a waste of time
and not the most sensible thing to model a robot after a human being.
A robot needs to be above all functional and designed with qualities
that suits its primary tasks. It depends on the task at hand
whether the robot is big, small, able to move or nailed to the ground.
Each and every task means different qualities, form and function, a
robot needs to be designed with the task in mind.
Mars Explorer images and other
space robot images courtesy of NASA. |
Mobile
robots are able to move, usually they perform task such as search
areas. A prime example is the Mars Explorer, specifically designed
to roam the mars surface.
Mobile
robots are a great help to such collapsed building for survivors
Mobile robots are used for task where people cannot go. Either
because it is too dangerous of because people cannot reach the
area that needs to be searched.
|
Mobile robots
can be divided in two categories:
|
Rolling Robots: Rolling robots have wheels to move
around. These are the type of robots that can quickly and easily
search move around. However they are only useful in flat areas,
rocky terrains give them a hard time. Flat terrains are their
territory. |
 |
| |
|
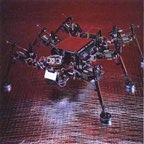 |
Walking Robots: Robots on legs are usually brought in
when the terrain is rocky and difficult to enter with wheels.
Robots have a hard time shifting balance and keep them from
tumbling. That�s why most robots with have at least 4 of them,
usually they have 6 legs or more. Even when they lift one or more
legs they still keep their balance. Development of legged robots
is often modeled after insects or crawfish.. |
 |
Robots are
not only used to explore areas or imitate a human being. Most
robots perform repeating tasks without ever moving an inch. Most
robots are �working� in industry settings. Especially dull and
repeating tasks are suitable for robots. A robot never grows
tired, it will perform its duty day and night without ever
complaining. In case the tasks at hand are done, the robots will
be reprogrammed to perform other tasks..
|
 |
Autonomous
robots are self supporting or in other words self contained. In a
way they rely on their own �brains�.
Autonomous
robots run a program that give them the opportunity to decide on
the action to perform depending on their surroundings. At times
these robots even learn new behavior. They start out with a short
routine and adapt this routine to be more successful at the task
they perform. The most successful routine will be repeated as
such their behavior is shaped. Autonomous robots can learn to
walk or avoid obstacles they find in their way. Think about a six
legged robot, at first the legs move ad random, after a little
while the robot adjust its program and performs a pattern which
enables it to move in a direction. |
|
An
autonomous robot is despite its autonomous not a very clever or
intelligent unit. The memory and brain capacity is usually
limited, an autonomous robot can be compared to an insect in that
respect.
In case a
robot needs to perform more complicated yet undetermined tasks an
autonomous robot is not the right choice.
Complicated
tasks are still best performed by human beings with real
brainpower. A person can guide a robot by remote control. A
person can perform difficult and usually dangerous tasks without
being at the spot where the tasks are performed. To detonate a
bomb it is safer to send the robot to the danger area.
|
 |
Dante 2, a NASA robot designed to
explore volcanoes via remote control.
|
|
Virtual robots don�t exits in real
life. Virtual robots are just programs, building blocks of software
inside a computer. A virtual robot can simulate a real robot or just
perform a repeating task. A special kind of robot is a robot that
searches the world wide web. The internet has countless robots
crawling from site to site. These WebCrawler�s collect information on
websites and send this information to the search engines.
Another popular virtual robot is the chatterbot. These robots
simulate conversations with users of the internet. One of the first
chatterbots was ELIZA.
There are many varieties of chatterbots now, including E.L.V.I.S.
 |
BEAM is
short for Biology, Electronics, Aesthetics
and Mechanics. BEAM robots are made by hobbyists. BEAM
robots can be simple and very suitable for starters.
|
Robots are often modeled after nature. A lot of BEAM robots
look remarkably like insects. Insects are easy to build in mechanical
form. Not just the mechanics are in inspiration also the limited
behavior can easily be programmed in a limited amount of memory and
processing power.
Like all robots they also contain electronics. Without electronic
circuits the engines cannot be controlled. Lots of Beam Robots also
use solar power as their main source of energy.
A BEAM Robot should look nice and attractive. BEAM robots have
no printed circuits with some parts but an appealing and original
appearance.
In contrast with expensive big robots BEAM robots are cheap,
simple, built out of recycled material and running on solar energy.
|


