|
The robots of
tomorrow will be the direct result of the robotic research projects of
today. The goals of most robotic research projects is the advancement
of abilities in one or more of the following technological areas:
Artificial intelligence, effectors and
mobility, sensor detection and especially
robotic vision, and control systems.
These
technological advances will lead to improvements and innovations in
the application of robotics to industry, medicine, the military, space
exploration, underwater exploration, and personal service. The
research projects listed below are only a few of many robotic research
projects worldwide.
Artificial Intelligence
|

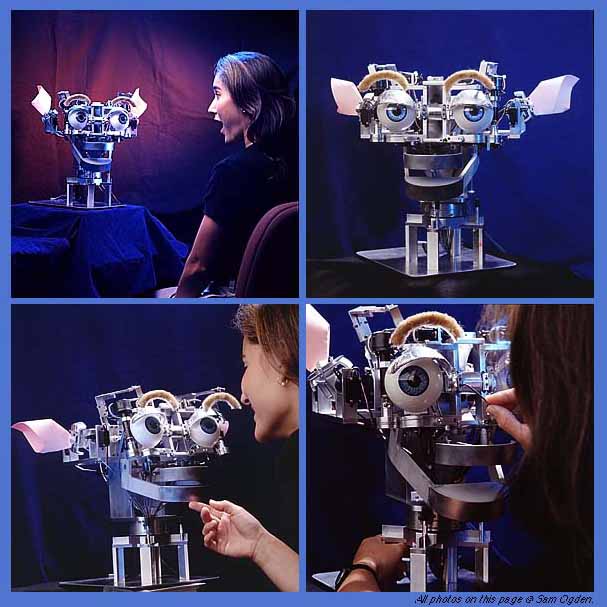
Cog, a humanoid robot from MIT. |
|
Two of the many research projects of
the MIT Artificial Intelligence department include an artificial
humanoid called Cog, and his baby brother, Kismet. What the
researchers learn while putting the robots together will be shared
to speed up development.
Once finished, Cog
will have everything except legs, whereas Kismet has only a
3�6-kilogram head that can display a wide variety of emotions. To
do this Kismet has been given movable facial features that can
express basic emotional states that resemble those of a human
infant. Kismet can thus let its "parents" know whether it needs
more or less stimulation--an interactive process that the
researchers hope will produce an intelligent robot that has some
basic "understanding" of the world.
|
|
This approach of creating AI by
building on basic behaviors through interactive learning contrasts
with older methods, in which a computer is loaded with lots of
facts about the world in the hope that intelligence will
eventually emerge.
Cog is 2 meters tall, complete
with arms, hands and all three senses--including touch-sensitive
skin. Its makers will eventually try to use the same sort of
social interaction as Kismet to help Cog develop intelligence
equivalent to that of a two-year-old child. |
|
Kismet is an autonomous robot
designed for social interactions with humans and is part of the
larger Cog Project. This project focuses not on robot-robot
interactions, but rather on the construction of robots that engage
in meaningful social exchanges with humans. By doing so, it is
possible to have a socially sophisticated human assist the robot
in acquiring more sophisticated communication skills and helping
it learn the meaning these acts have for others. |
|
|
 Kismet has a repertoire of responses driven by emotive and
behavioral systems. The hope is that Kismet will be able to build
upon these basic responses after it is switched on or "born",
learn all about the world and become intelligent. Kismet has a repertoire of responses driven by emotive and
behavioral systems. The hope is that Kismet will be able to build
upon these basic responses after it is switched on or "born",
learn all about the world and become intelligent.
Crucial to its drives are the
behaviors that Kismet uses to keep its emotional balance. For
example, when there are no visual cues to stimulate it, such as a
face or toy, it will become increasingly sad and lonely and look
for people to play with.
Any advances made with Kismet
will be passed on to its big brother Cog, the robot brainchild of
Rodney Brooks, head of MIT's AI department. |
|
In
mimicking human intelligence, the goal is to make sure robots get
a brain and reasoning. An important pioneer in the field of AI is
Marvin Minsky.
Without a brain capable of
processing input, a robot cannot react to its environment. A brain
can be stimulated in hardware or software. Most robots at present
have software brains, meaning a computer with a program running.
These robots are connected to or equipped with a computer. A
drawback is the limited number of processes that can be run on
today's computers and the single purpose programs running on these
computers. The programs cannot change themselves. In other words,
learning is not possible.
A brain made out of hardware, or a number of processors will be
closer to reality. The brain will consists of several chips that
act both independently and as a group. The general belief is that
the real brain works as a neural network of lots of independent
processing units. Every chip in itself has a small program. It
will process information but also pass it on to other chips. The
program changes on a continuous basis. The network of chips is
quick and will adapt, so in contrast with the software brain, it
will learn.
An example of a hardware brain
is Robokoneko the robocat from Genobyte. It has a brain from a
machine, the CAM-machine. |
 |
Effectors
and Mobility
 |
Robot helicopter research began at the University of Southern
California in 1991 with the formation of the Autonomous Flying
Vehicle Project and continues to the present day. The first robot
built was the AFV (Autonomous Flying Vehicle). The AVATAR
(Autonomous Vehicle Aerial Tracking And Retrieval), was created in
1994. The current robot, the second generation AVATAR (Autonomous
Vehicle Aerial Tracking And Reconnaissance), was developed in
1997. The ``R'' in AVATAR changed to reflect a change in robot
capabilities. |
|
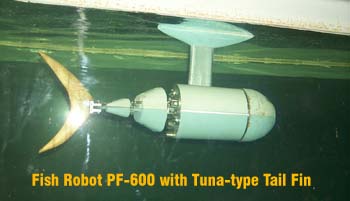
Without question, the fish is the
best swimmer in the world. That is why the Ship Research Institute
of Japan decided to build the Fish Robot. This project hopes to
apply what is learned while building and researching with the Fish
Robot to the design and construction of ships. |
 |
|
Robots use electro-engines for movement. Engine parts are
relatively cheap and last long. Engines are applied to move arm,
turn wheels or move other parts, for instance camera's. Engines
are less usefull with walking robots. In that particular case
engines prove to be a weak part, a jumping robot is a mayor
challenge to engine parts. Human being use muscle, which contract
and expand, to move around. A muscle receive a signal form the
brain and contracts. Causing a joint, like the knee to move. Material to mimic a muscle is still a dream. Nitinol, an alloy
that consist of the metals nickel and titanium will shrink if an
electric current travels through the alloy, it will only contract
8% maximum. The downside, nitinol is very expensive en the contraction is
too little to allow it to be used to make walking robots. For the
time being walking robots will not use muscles or engines but
pneumatic of hydrolic technologies.
 |
|
 |
 |
|
To
demonstrate advances in research and to stimulate scientist to
share progress the Robocup competition is organized a few times a
year. Robocup is a competition of Robot soccer teams. Movement,
pattern recognition, where's the ball, where's the goal, who is in
my team, all this and more is needed to score a goal. A simple
games becomes a challenge for a robot team. Besides moving and
finding the ball and team members the robots needs to define a
strategy and take lots of decisions in a short time frame. Robocup
has produced many advancements in both robotic effectors and
sensors. Who could have imagined that soccer would contribute to
robot research where robots eventually will be smart and capable
of cooperation with other to reach a goal? |
Sensor
Detection
|
 Machine vision involves devices which sense images and
processes which interpret the images. Thomas Braunl of The
University of Western Australia provides an excellent example
of robotic vision research in both hardware and software. Machine vision involves devices which sense images and
processes which interpret the images. Thomas Braunl of The
University of Western Australia provides an excellent example
of robotic vision research in both hardware and software.
 |
|
EyeBot is a controller for
mobile robots with wheels, walking robots or flying robots. It
consists of a powerful 32-Bit microcontroller board with a
graphics display and a digital grayscale or color camera. The
camera is directly connected to the robot board (no frame
grabber). This allows programmers to write powerful robot
control programs without a big and heavy computer system and
without having to sacrifice vision.
-
Ideal basis for
programming of real time image processing
-
Integrated digital camera
(grayscale or color)
-
Large graphics display
(LCD)
-
Can be extended with own
mechanics and sensors to full mobile robot
-
Programmed from IBM-PC or
Unix workstation,
programs are downloaded via serial line (RS-232) into RAM or
Flash-ROM
-
Programming in C or
assembly language
|
 |
 |
|
|
 Improv is a tool for basic real time image processing with low
resolution, e.g. suitable for mobile robots. It has been developed
for PCs with Linux operating system. Improv works
with a number of inexpensive low-resolution digital cameras (no
framegrabber required), and is available from Joker Robotics.
Improv displays the live camera image in the first window,
while subsequent image operations can be applied to this image in
five more windows. For each sub-window, a sequence of image
processing routines may be specified. Improv is a tool for basic real time image processing with low
resolution, e.g. suitable for mobile robots. It has been developed
for PCs with Linux operating system. Improv works
with a number of inexpensive low-resolution digital cameras (no
framegrabber required), and is available from Joker Robotics.
Improv displays the live camera image in the first window,
while subsequent image operations can be applied to this image in
five more windows. For each sub-window, a sequence of image
processing routines may be specified. |
Sensor Based Planning incorporates
sensor information, reflecting the current state of the environment,
into a robot's planning process, as opposed to classical planning ,
where full knowledge of the world's geometry is assumed to be known
prior to the planning event. Sensor based planning is important
because: (1) the robot often has no a priori knowledge of the world;
(2) the robot may have only a coarse knowledge of the world because of
limited memory; (3) the world model is bound to contain inaccuracies
which can be overcome with sensor based planning strategies; and (4)
the world is subject to unexpected occurrences or rapidly changing
situations.
There already exists a large
number of classical path planning methods. However, many of these
techniques are not amenable to sensor based interpretation. It is not
possible to simply add a step to acquire sensory information, and then
construct a plan from the acquired model using a classical technique,
since the robot needs a path planning strategy in the first place to
acquire the world model.
The first principal problem in
sensor based motion planning is the find-goal problem. In
this problem, the robot seeks to use its on-board sensors to find a
collision free path from its current configuration to a goal
configuration. In the first variation of the find goal problem, which
we term the absolute find-goal problem, the absolute
coordinates of the goal configuration are assumed to be known. A
second variation on this problem is described below.
The second principal problem in
sensor based motion planning is sensor-based exploration, in
which a robot is not directed to seek a particular goal in an unknown
environment, but is instead directed to explore the apriori unknown
environment in such a way as to see all potentially important
features. The exploration problem can be motivated by the following
application. Imagine that a robot is to explore the interior of a
collapsed building, which has crumbled due to an earthquake, in order
to search for human survivors. It is clearly impossible to have
knowledge of the building's interior geometry prior to the
exploration. Thus, the robot must be able to see, with its on-board
sensors, all points in the building's interior while following its
exploration path. In this way, no potential survivors will be missed
by the exploring robot. Algorithms that solve the find-goal problem
are not useful for exploration because the location of the ``goal'' (a
human survivor in our example) is not known. A second variation on the
find-goal problem that is motivated by this scenario and which is an
intermediary between the find-goal and exploration problems is the
recognizable find-goal problem. In this case, the absolute
coordinates of the goal are not known, but it is assumed that the
robot can recognize the goal if it becomes with in line of sight. The
aim of the recognizable find-goal problem is to explore an unknown
environment so as to find a recognizable goal. If the goal is reached
before the entire environment is searched, then the search procedure
is terminated.
Control
Systems
 |
Development of a hierarchical behavior control scheme for rovers
and mobile robots is currently underway. It attempts to model and
control mobile systems using distinct rule-based controllers and
decision-making subsystems that collectively represent a
hierarchical decomposition of autonomous vehicle behavior. This
research approach employs fuzzy logic, behavior control, and
genetic programming as tools for developing autonomous robots.
Complex, multi-variable fuzzy rule-based systems are developed in
the framework of behavior-based control for autonomous navigation.
Genetic programming methods are used to computationally evolve
fuzzy coordination rules for low-level motion behaviors. In
addition, embedded control applications are being developed for microrover navigation using conventional microprocessors and
specialized fuzzy VLSI chips. |
The movie Innerspace shows a
miniature spaceship travelling through the artery system of a human.
It is a nice illustration of the promise of Nano technology. Nano
Technology is a technique where miniature robots go to places humans
will never be able to travel. Nano technology is a new science where
robotics play a mayor part. Questions that needs to be solved because
of the very tiny mechinical parts: can a robot repair itself, how do
you control a nano robot, how does a nano robot move. Will it be able
to work autonomously. Will it be able so shift in shape. Is a nanan
robot a mechanical device or is it more like a microprocessor. Once
these questions are answered Nano technology will change medical
science for ever. Surgery will be performed in lots of cases by one or
more Nano robots that will travel inside the human body.
Third generation wireless networks like the Universal
Mobile telecommunication System (UMTS) are being developed to support
wide band services. A major scenario is to support such services of a
user roaming between a cellular terrestrial network and a satellite
Personal Communication Network (PCN) while maintaining the quality of
service during the hand-over process. And requiring some degree of
continuity of quality of service guarantees. This project will focus
on developing new protocols which uses artificial intelligent systems
to support such hand-over process. Further Seamless roaming and user
tracking using intelligent systems will be investigated.
In recent years, the
reduction of undesirable vibrations in the dynamic systems such as
airplanes, vehicles, tall buildings and off-shore structures has
become a crucial issue due to the increased social awareness of
comfort as well as the ever increasing heights of new inner city
buildings. With the advent of new construction materials and new
construction methods, the buildings and structures are becoming
taller, and more flexible. With a good design and under normal loading
conditions, the response of these structures to vibrations will remain
in the safe and comfortable domain. However, there is no guarantee
that in-service loads experienced by tall buildings and structures
will always be in the allowed range. The undesirable vibration levels
could be reached under large environmental loads such as winds and
earthquakes, and could adversely affect human comfort and even
structural safety. It is becoming critically important to suppress
dynamic responses of tall buildings and structures due to the strong
winds and earthquakes not only for their safety but also their
serviceability. When tall buildings and structures are flexible,
design performances may become impossible to achieve by conventional
design practice. Hence, additional devices are installed in tall
buildings and structures to compensate the dynamic responses caused by
environmental loads. As a result, new concepts and methods of
structural protection have been proposed.
Due to recent development of
sensors and digital control techniques, active control methods of
dynamic responses of tall buildings and structures have been
developed, and some of them have been implemented to actual buildings.
The precondition is however that the implementation is simple enough
to be realtime. In engineering applications with rule based systems
providing efficient results, the implementation is often easier than
its complex conventional counterpart.
The active vibration control in
the structural engineering has become known as an area of research in
which the vibrations and motions of the tall buildings and structures
can be controlled or modified by means of the actions of a control
system through some external energy supply. Compared with the passive
vibration control the active vibration control can more effectively
keep the tall buildings and structures safe and comfortable under the
various environmental loads such as strong winds or earthquake
hazards. This implies that the active vibration control can be
effective and adaptive over a much wider frequency range and also for
transient vibration, which is the reason to attract interest of the
researchers not only in structural engineering but also in control
engineering. Among many methods, that have been proposed, are active
mass drivers (AMDs), active tendon systems (ATS), and active variable
stiffness systems (AVSs).
Robot manipulators which have more
than the minimum number of degrees-of-freedom are termed ``kinematically
redundant,'' or simply ``redundant.'' Redundancy in manipulator design
has been recognized as a means to improve manipulator performance in
complex and unstructured environments. ``Hyper-redundant'' robots have
a very large degree of kinematic redundancy, and are analogous in
morphology and operation to snakes, elephant trunks, and tentacles.
There are a number of very important applications where such robots
would be advantageous.
While ``snake-like'' robots have
been investigated for nearly 25 years, they have remained a laboratory curiousity. There are a number of reasons for this: (1) previous
kinematic modeling techniques have not been particularly efficient or
well suited to the needs of hyper-redundant robot task modeling; (2)
the mechanical design and implementation of hyper-redundant robots has
been perceived as unnecessarily complex; and (3) hyper-redundant
robots are not anthropomorphic, and therefore pose interesting
programming problems. Our research group has undertaken a broadly
based program to overcome the obstacles to practical deployment of
hyper-redundant robots. |



